Arkadaşlar merhaba. Birkaç gündür motor sürücü devrelerine tek dc motor bağlayıp çalıştırmak konusunda sıkıntılar yaşıyordum, bugün çözmüş bulunmaktayım. Belki ileride aynı sorunla karşılaşan olur diye çözümü ufak bir yazı ile vermek istedim.
Sorunum şuydu:
Kullandığım motor sürücü devreler (L298N ve L9110s), 2 DC motor veya 1 stepper motor sürebilme kabiliyetine sahipler. Nedenini bilmediğim bir şekilde iş tek dc motor sürmeye gelince ikisi de bocaladı.
Motor sürücü devresi ne diye soracak olursanız; mikrodenetleyiciler ile birlikte motor sürmek istediğinizde kullanılan devrelerdir. Kullanılmalarının nedeni ise bu mikrodenetleyicilerin motor için gerekli akımı tek başına sağlayamamalarıdır.
Akışta konuyla ilgili paylaşımlarıma denk gelmiş arkadaşlar olabilir. L298N kullandığımda 1.5Volt ile çalışması gereken motoru 18Volt ile ancak çalıştırabilmiştim. L9110s te konu biraz daha ilginç. Bu motor sürücünün de iddiası 2 dc motoru sürebileceği. Bu arkadaşta iş tek motoru çalıştırmaya gelince bocaladı. Gelen sinyal sürekli olmasına rağmen motoru sadece bir saniyeliğine çalıştırıp duruyordu. Biraz uğraştıktan sonra sorunu çözebildim. Öncellikle motor sürücünün özelliklerini yazayım.
Özellikleri:
- İki ayrı motoru bağımsız olarak kontrol edebilmenizi sağlar.
- Sürekli 800mA kanal başına akım verebilmektedir.
- Anlık olarak 2A kanal başına akım verebilmektedir.
- 7,5V motor çıkış voltajı vermektedir.(6V motorlar için ideal gerilim)
- Boyut: 32 mm x 23 mm
- Ağırlık: 7 gr
- 6 adet pin girişi bulunmaktadır. VCC(3-12V),GND,IB1,IA1(Motor 1 Giriş),IB2,IA2(Motor 2 Giriş)
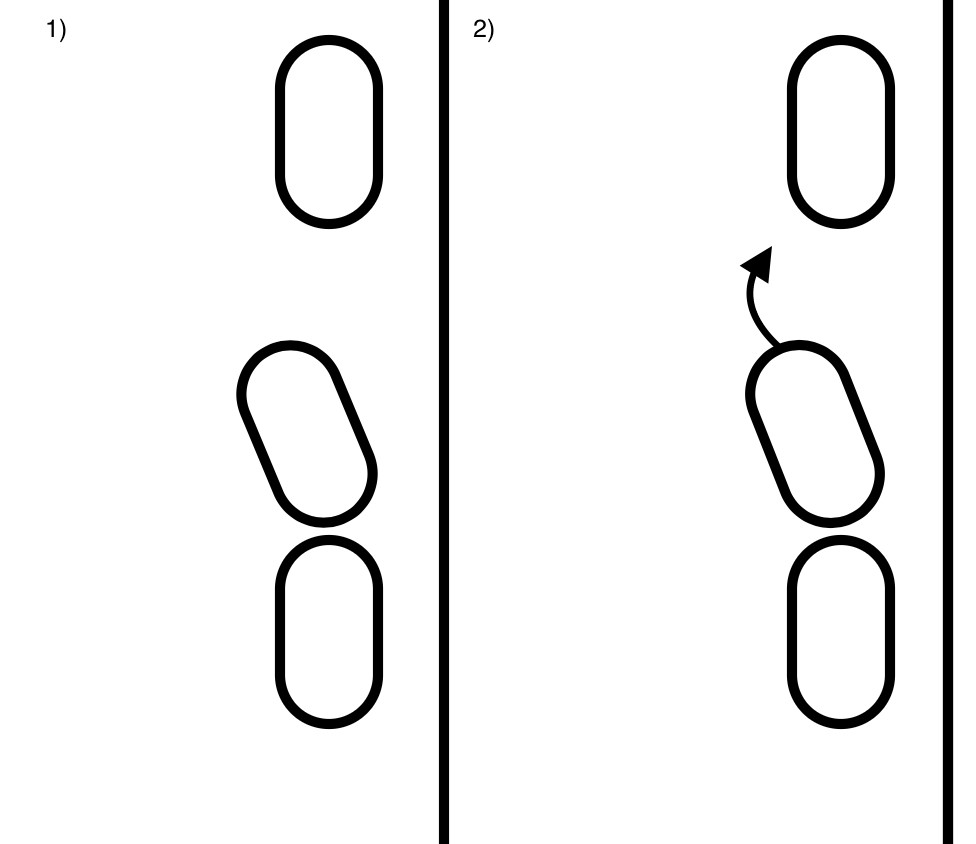
Bu motor sürücü diğer sürücülerden farklı olarak her bir motor için iki girişe sahip. Diğer sürücü devrelerde 2 giriş yön tayini için kullanılırken 1 giriş ise hız ayarlaması için PWM pinlerle beraber kullanılıyor. L9110s te ise mevcut iki pinde analog giriş almakta olup ikisi de PWM pinlerle kullanılıyor. Böylece hem yön tayini hem de motor hızı bu iki pinle halledilmiş oluyor.
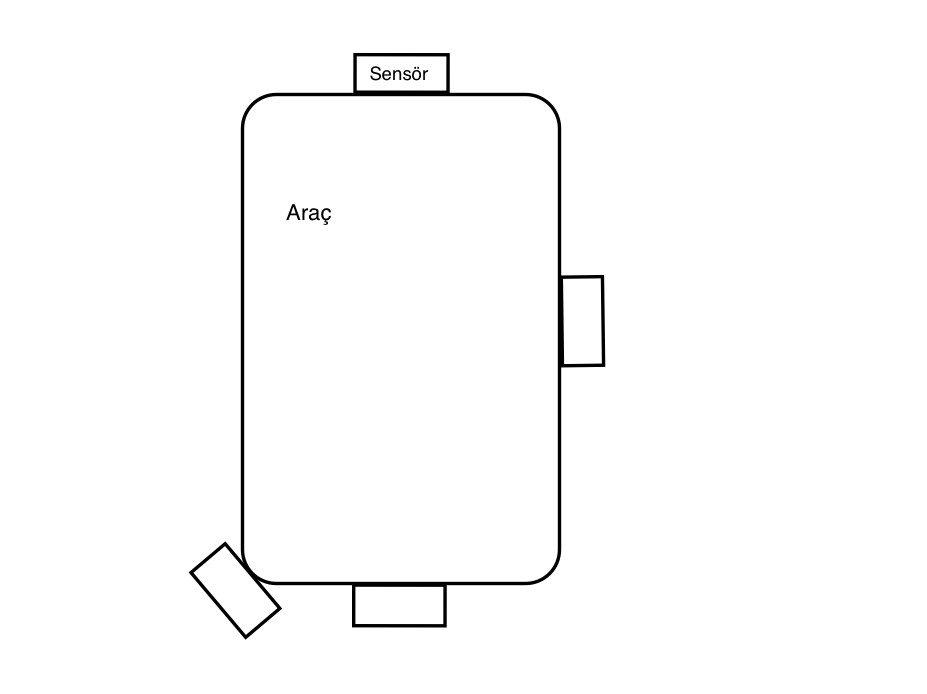
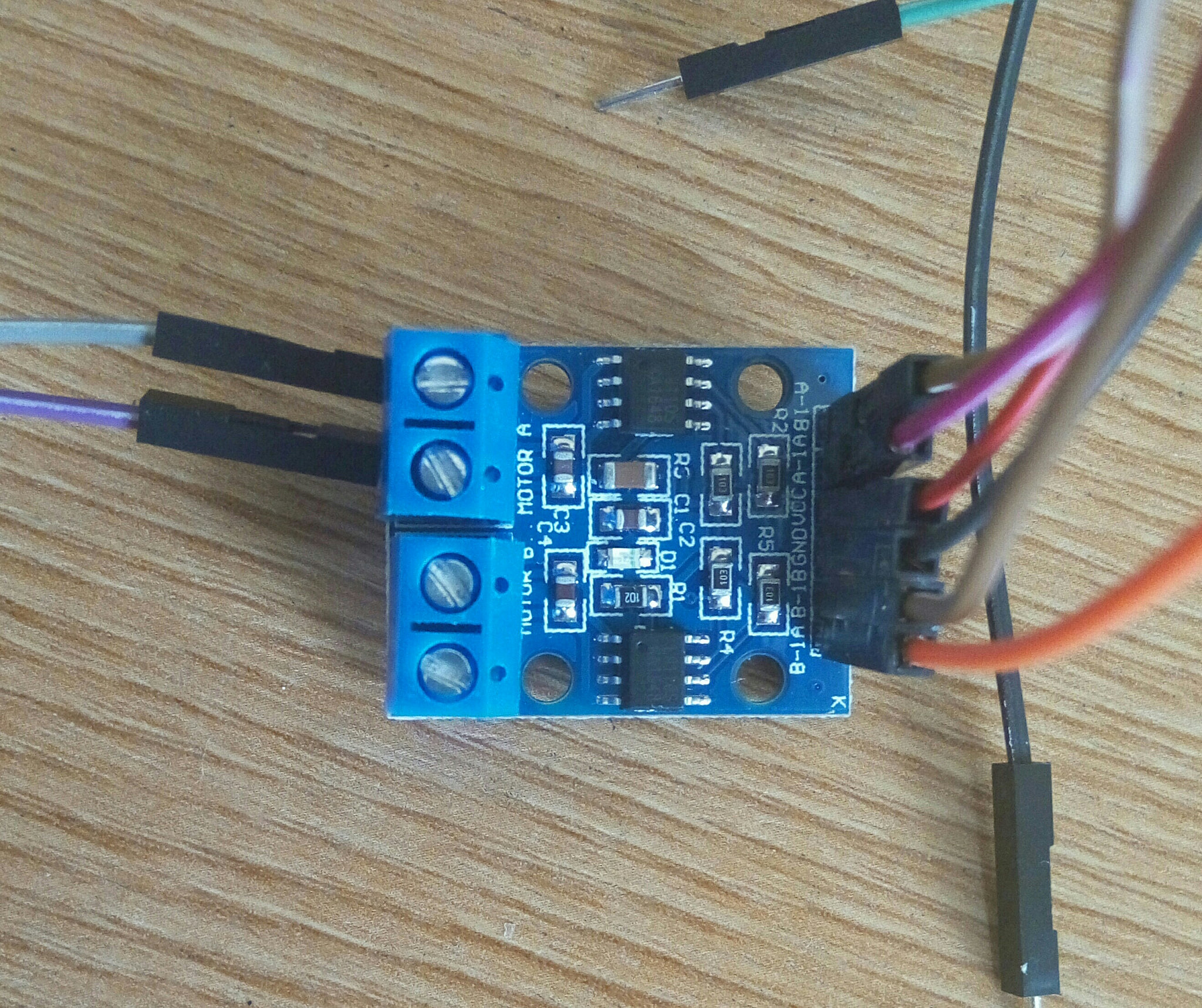
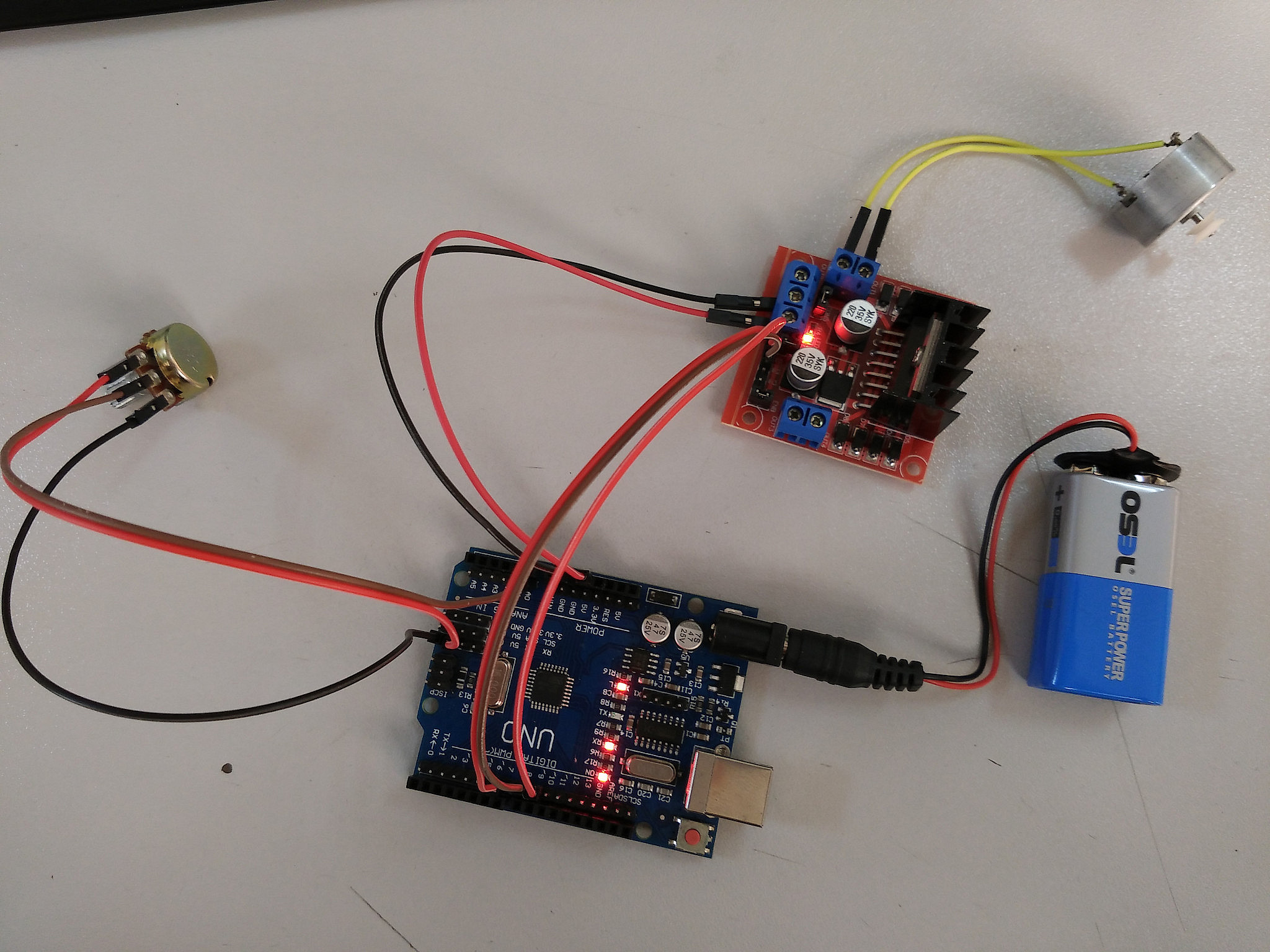
Oluşturduğum devreninin fritzing şemasını verecektim fakat fritzinde motor sürücü devre modülü maalesef yok. O yüzden ancak resim ekleyebileceğim. Aşağıda resimde de görüldüğü gibi tek motor kullanacak olmama rağmen iki motor için de girişleri bağladım. Asıl olayı da bu zaten. Anlamadığım bir şekilde bu iki ekstra pini de bağlamadan motor çalışmıyor.

Kod kısmına gelecek olursak:
int AIB = 5 ;
int AIA = 6 ;
int BIB = 9 ;
int BIA = 10 ;
void setup() {
pinMode(AIB,OUTPUT);
pinMode(AIA,OUTPUT);
pinMode(BIA,OUTPUT);
pinMode(BIB,OUTPUT);
}
void loop() {
ileri();
}
void ileri(){
analogWrite(AIB,100);
analogWrite(AIA,0);
analogWrite(BIB,255);
analogWrite(BIA,255);
}
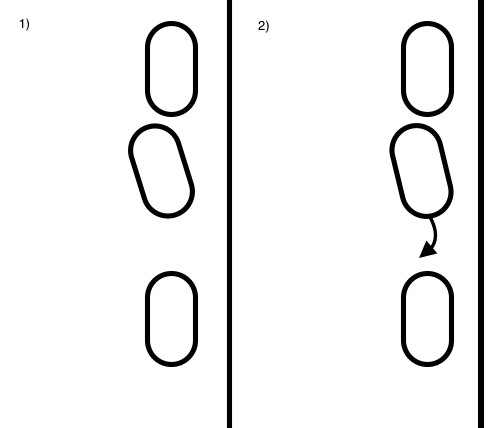
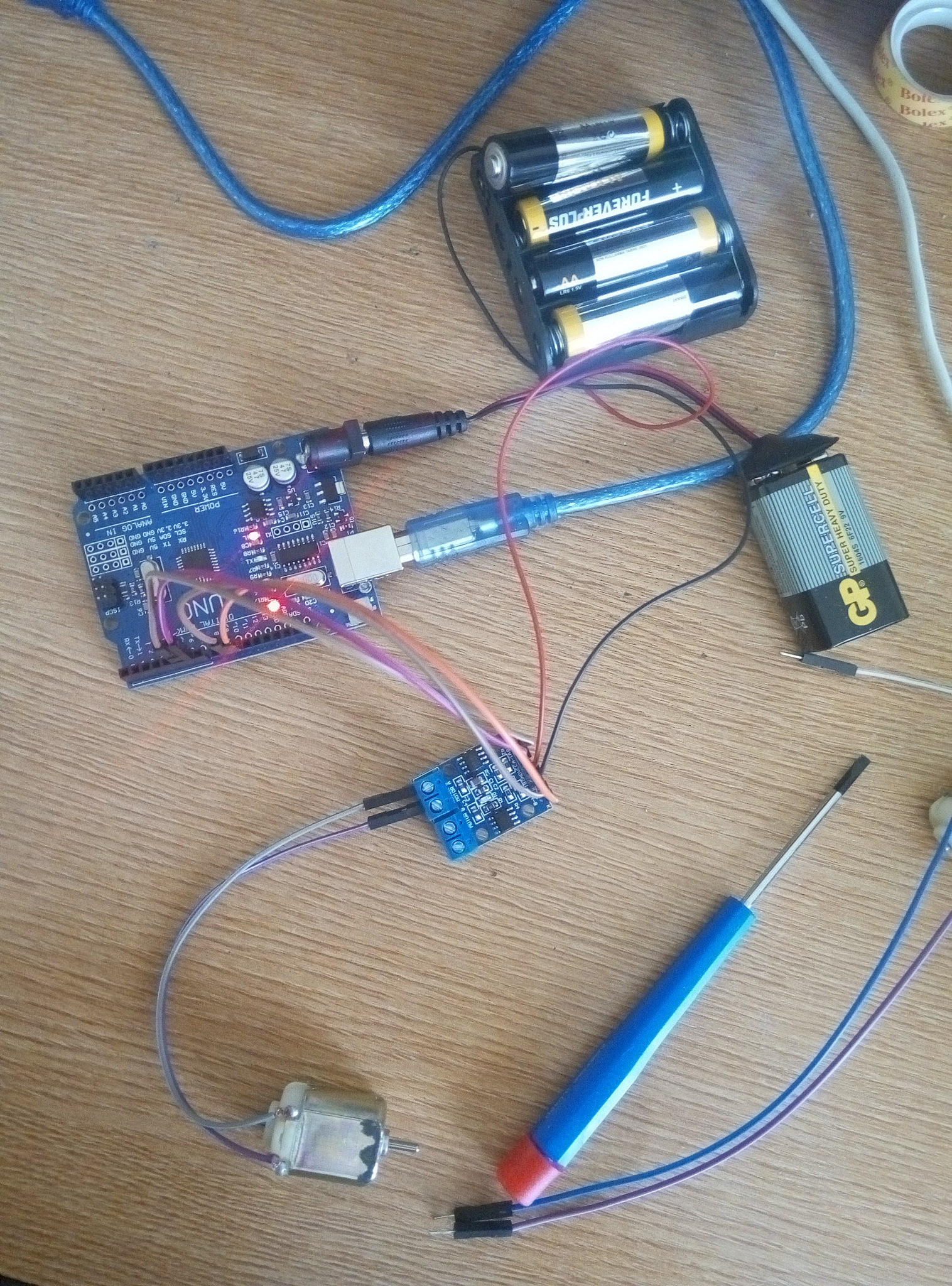
Yukarıda görüldüğü gibi B motoru olmamasına rağmen o kanala PWM pinleri sayesinde 255 değerini gönderdik. Yukarıda da belirttiğim gibi hiç anlamadığım şekilde motor çalıştı. Devrenin son hali ise aşağıdadır.
İşin teknik tarafına hakim arkadaşlar neden bu şekilde çalıştığını söylerlerse makbule geçer 🙂

#Arduino #DIY #Elektronik #Konudışı















Hangi Android sürümü var içinde şu anda?
Android 7.1.2 Nougat işletim sistemi kullanıyor güvenlik yaması düzeyide ekim ayında
Aynen 7.1.2
Bu xiaomi mi a1 aldım yeni ama beğenmedim miu rom atılıyormu bilgisi olan varmı ben miu Roma alıştım bunu hiç sevmedim ben iğrenç ötesi ya
Atılıyordur hocam da ben bilmiyorum. Yazıyı paylaşayım bilenler yardım eder mutlaka.
@yunus__sarigul çok sevinirim paylaş beni bilgilendiriniz lütfen ben pek anlamıyorum nurdan
@yunus__sarigul paylastinmi cevap ne
Ben 1 hafta önce aldım Android sürümü 7.1.2 var güncelleme yapmak istediğimde güncel diyor ve pil yüzdesi gözükmüyor.
Sizce iade edip note3 mu alayım